شبیه سازی کنترلر کوادروتور در متلب QUADROTOR ترکیب دو مقاله سال 2016
فرمت فایل دانلودی: .zipفرمت فایل اصلی: zip,doc, m
تعداد صفحات: 16
حجم فایل: 3808
قیمت: 150000 تومان
بخشی از متن:
شبیه سازی کوادروتور با متلب QUADROTOR
گزارش شبیه سازی مقاله با متلب:
Robust Chattering Free Backstepping sliding Mode Control Strategy for Autonomous Quadrotor Helicopter
دانلود رایگان مقاله در تری پل!
و این مقاله :
http://miscj.aut.ac.ir/article_528.html
در این مقاله هدف طراحی یک کنترل کننده مقاوم برای یک Quadrotor در حضور عدم قطعیتها میباشد. برای این منظور از سه روش کنترلی یا در حقیقت از سه رویکرد کنترلی برای رسیدن به این هدف استفاده شده است.
در ابتدا دینامیک مربوط به یک پهپاد به صورت زیر ارائه شده است.
.
.
.
کنترل برمبنای پسگام و مد لغزشی
در بخش بعدی مقاله، به کنترل کننده IBC یا پسگام ایده آل یک بخش مقاوم که برگرفته از ایده مد لغزشی است اضافه شده است تا در صورتی که اطلاعی از میزان عدم قطعیت در دینامیک اصلی سیستم نداشته باشیم، کنترل کننده ای مقاوم طراحی کرده باشیم. قانون کنترلی این بخش به صورت زیر است.
در حقیقت با استفاده از تابع علامت بخشی به کنترل کننده پس گام اضافه شده است تا مقاومت قانون کنترلی در برابر عدم قطعیت هایی که حد بالای آن ها نامعلوم است بیشتر شود.
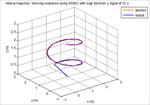
کدهای شبیه سازی مربوط به این بخش در پوشه BSMC with sign function موجود است. با اجرای ام فایل main_BSMC_sign_modelling میتوانید نتایج شبیه سازی ها را مشاهده کنید.
شماتیک شبیه سازی این بخش به صورت زیر است.
.
.
فایل های مشابه در سایت های دیگر با قیمت های زیاد بفروش می رسند که هم قدیمی هستند و هم بدون محدودیت عدم قطعیت. این فایل علاوه بر شبیه سازی اصلی مقاله یک حالت SLIDING MODE SECONDرا از مقاله دوم (ایرانی) نیز بررسی میکند که میتواند یک روش ترکیبی مناسب برای تحقیقات آتی باشد. فرصت را از دست ندهید
این فایل انحصاری است . هرگونه نشر بدون اجازه کتبی پیگیری قانونی دارد
 پرداخت با کلیه کارتهای عضو شتاب امکان پذیر است.
پرداخت با کلیه کارتهای عضو شتاب امکان پذیر است.